





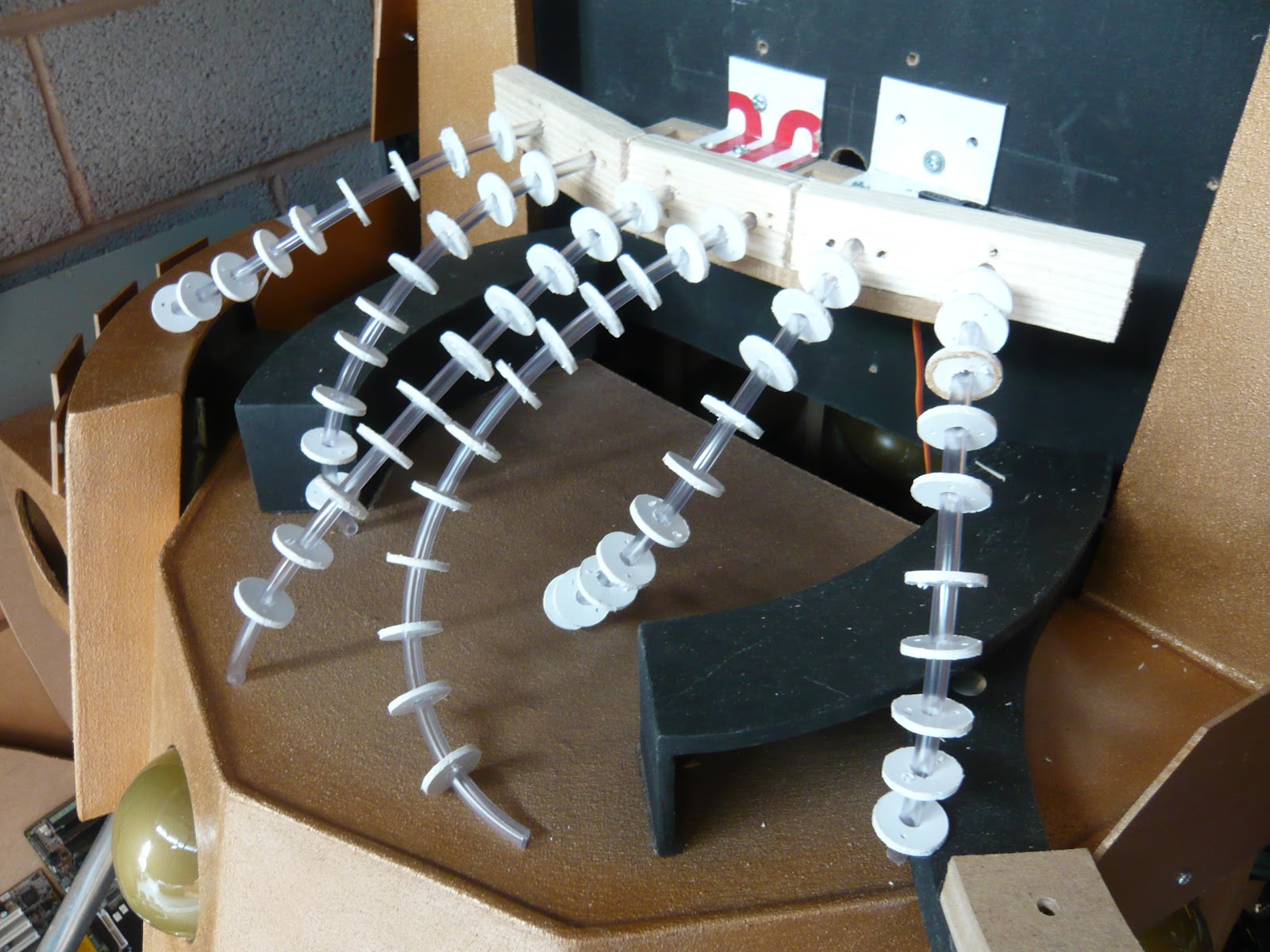
I thought I might start on the beginnings of the framework for the animatronic mutant. Six of the legs will move, the eye will blink and the head will pulsate. All of these movements will be controlled via servos and be cable operated. The sub structure needs to be build first then eventually the outer latex skin will be wrapped over it. Each of the legs that will move has a central support tube which is fairly ridged. Over this is placed ten or so small styrene disks with two smaller holes drilled. Through these smaller holes the cables will travel, up through the frame and onto the servos. The idea is that when the cables are pushed and pulled by the servos the legs will move. Two legs are connected to one servo but the movement will be in a different axis, i.e. one leg will move horizontally and the other vertically, and so on on the other two servos. I know the system will work, check out the prototype video.
The eye will be much simpler. The eyelids will open and close controlled via a single servo, fairly simple really. The head pulsating will be just a couple of micro servos pushing and pulling on the inside of the head structure.
No comments:
Post a Comment